Cómo seleccionar motores de torniquetes para peatones: una comparación basada en datos de vida útil, velocidad y estabilidad
Al comprar peatones.torniquetes, muchos clientes se centran inicialmente en la apariencia, los materiales o los métodos de identificación (tarjetas RFID, reconocimiento facial, códigos QR).
Sin embargo, en la operación real del proyecto, el factor fundamental que realmente determina la estabilidad, durabilidad y experiencia del usuario del equipo se encuentra en un nivel más profundo:
Desde una perspectiva de ingeniería y aplicación, este artículo combina especificaciones técnicas con experiencia de campo para ayudarlo a comprender las diferencias entre las soluciones de motores y cómo seleccionar la óptima para su proyecto.
1. ¿Por qué el motor define la estabilidad del torniquete?
Según los datos operativos y de mantenimiento de numerosos proyectos de puertas para peatones, las estadísticas revelan que:
a) Aproximadamente entre el 60% y el 70% de las fallas del equipo se originan dentro del sistema de movimiento.
b) Más del 50% de estos problemas están directamente relacionados con el motor y sus componentes de accionamiento. Esto indica que el sistema motor es el factor principal que determina la vida útil, la estabilidad y la experiencia de rendimiento general de un torniquete.
También es común encontrar los siguientes escenarios en aplicaciones de campo:
c) La operación inicial es suave y normal.
d) Después de 1 a 2 años de uso, el equipo comienza a experimentar tartamudeo, ruidos anormales y fallas frecuentes.
Al rastrear la causa raíz, la mayoría de estos problemas están directamente relacionados con el tipo de motor y su metodología de control.
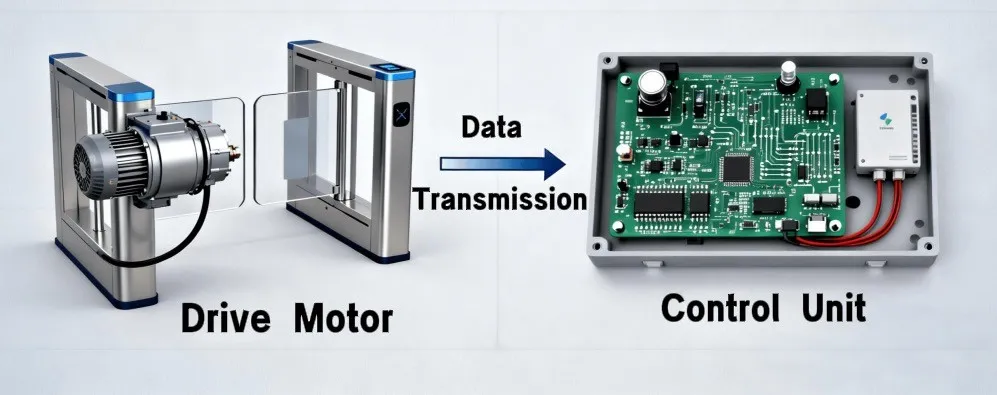
2. Comparación de datos básicos de diferentes soluciones de motores
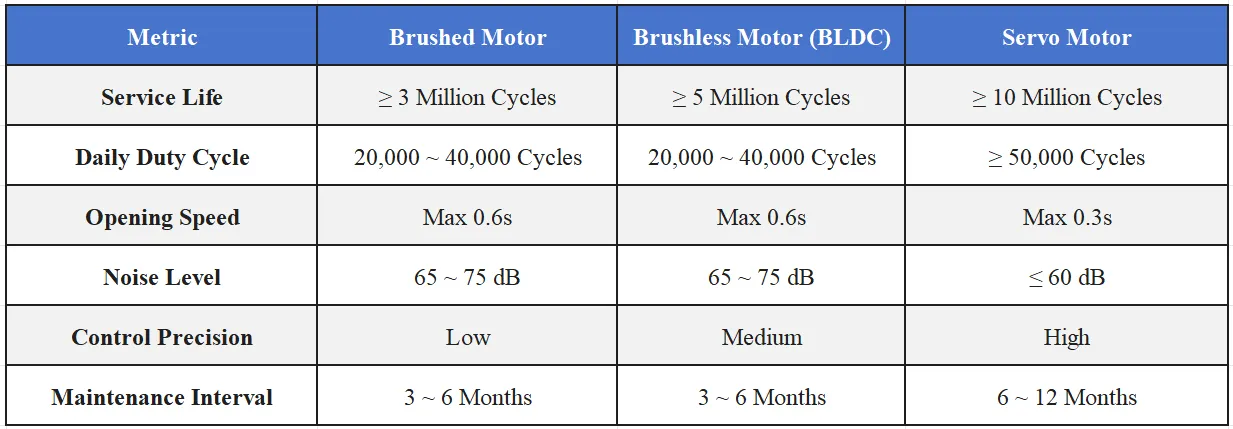
Actualmente, peatóntorniquetesen el mercado utilizan principalmente tres soluciones de motor: motores con escobillas, motores de CC sin escobillas (BLDC) y servomotores. La siguiente es una comparación de parámetros de ingeniería típicos (rangos estándar de la industria):
En la selección de proyectos reales, generalmente damos prioridad a las soluciones de motores según la frecuencia de rendimiento y la vida útil en lugar de simplemente comparar los costos de los equipos. En comparación con los motores con escobillas tradicionales, los motores sin escobillas (BLDC) pueden aumentar la vida útil entre 2 y 3 veces, mientras que los servomotores ofrecen mayores avances en velocidad, precisión y seguridad.
3. Eficiencia del rendimiento: mejora cuantificable en la experiencia del usuario
Muchos clientes expresan su deseo de contar con "torniquetes más suaves", pero la "suavidad" es en realidad una métrica cuantificable.
a) Velocidad de apertura (impacto directo en las colas)
Motor cepillado: Aprox. 0,6 s
Motor sin escobillas (BLDC): Aprox. 0,6 s
Servomotor: tan rápido como 0,3 s
En edificios de oficinas y proyectos de parques industriales (con un tráfico diario superior a 20.000+), se pueden observar claramente las siguientes tasas de rendimiento:
Motor cepillado: Aprox. 25–35 personas/minuto
Motor sin escobillas (BLDC): Aprox. 25–35 personas/minuto
Servomotor: 35+ personas/minuto
La diferencia se siente inmediatamente en si un lobby experimenta colas o
congestión.
b) Suavidad operativa (eliminando el "tartamudeo")
El factor central es la capacidad de control de aceleración y desaceleración:
Motor con escobillas: Sin control → Ciclos bruscos de arranque/parada.
Motor sin escobillas (BLDC): Perfiles de movimiento básicos → Generalmente suaves.
Servomotor: Aceleración/desaceleración en curva S → Prácticamente sin impacto.
En escenarios de tránsito de alta frecuencia, estas diferencias se amplifican continuamente, lo que impacta directamente en la experiencia general del usuario.
c) Control de Ruido (Impacto Ambiental)
Los entornos de oficinas comerciales normalmente requieren: Nivel de ruido ≤ 50 dB
Motor con escobillas: 60+ dB (ruido notable).
Motor sin escobillas (BLDC): Generalmente cumple con los estándares.
Servomotor: funcionamiento casi silencioso.
4. Capacidades de seguridad: el impacto crítico de la variación del motor
a) Velocidad de respuesta anti-pellizco
b) Motor con escobillas: 100–300 ms
c) Motor sin escobillas (BLDC): 50–100 ms
d) Servomotor: 10–50 ms
e) Cuanto más corto sea el tiempo de respuesta, mayor será el nivel de seguridad, una diferencia que se vuelve crítica en escenarios de tráfico de alta densidad.
Resumen: ¿Cómo evitar errores comunes en la selección?
Si quitamos solo una cosa, que sea esto: la verdadera diferencia entre los torniquetes no radica en su estética exterior, sino en sus motores y sistemas de control.
Para ser más específico:
a) Escenarios de baja frecuencia: los motores con escobillas son una opción viable.
b) Proyectos estándar: los motores sin escobillas (BLDC) son la opción preferida.
c) Proyectos de alta gama: Se recomiendan servomotores.
Conclusión: Elegir el motor incorrecto genera costos de mantenimiento continuos; Elegir el motor adecuado convierte su equipo en un activo estable a largo plazo. Si actualmente se encuentra en el proceso de selección de proyectos, le recomiendo centrarse en las siguientes áreas clave: tipo de motor (ya sea sin escobillas o servo), método de control (si cuenta con control de aceleración y desaceleración), historial comprobado (disponibilidad de datos operativos reales del proyecto). En proyectos específicos, adaptar el esquema de control y motor a los requisitos reales del tráfico suele ser mucho más eficaz que simplemente comparar las especificaciones técnicas.